我的机器人课程作业
AI Robotics 课程作业整理
week6作业记录:
第六周课程内容:
课程内容1:传感器介绍
课程内容2:传感器ros2 实验
作业成果:
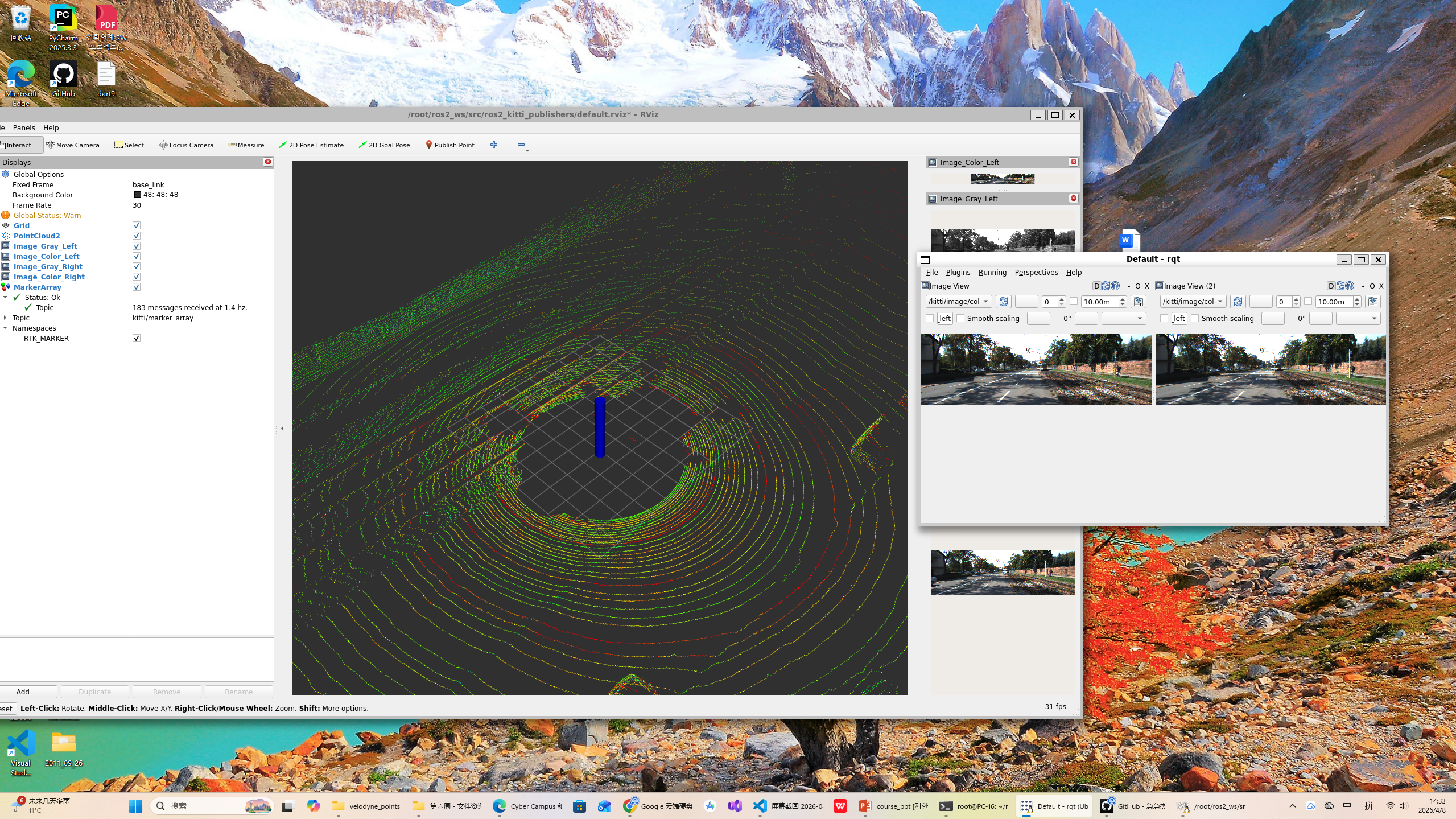
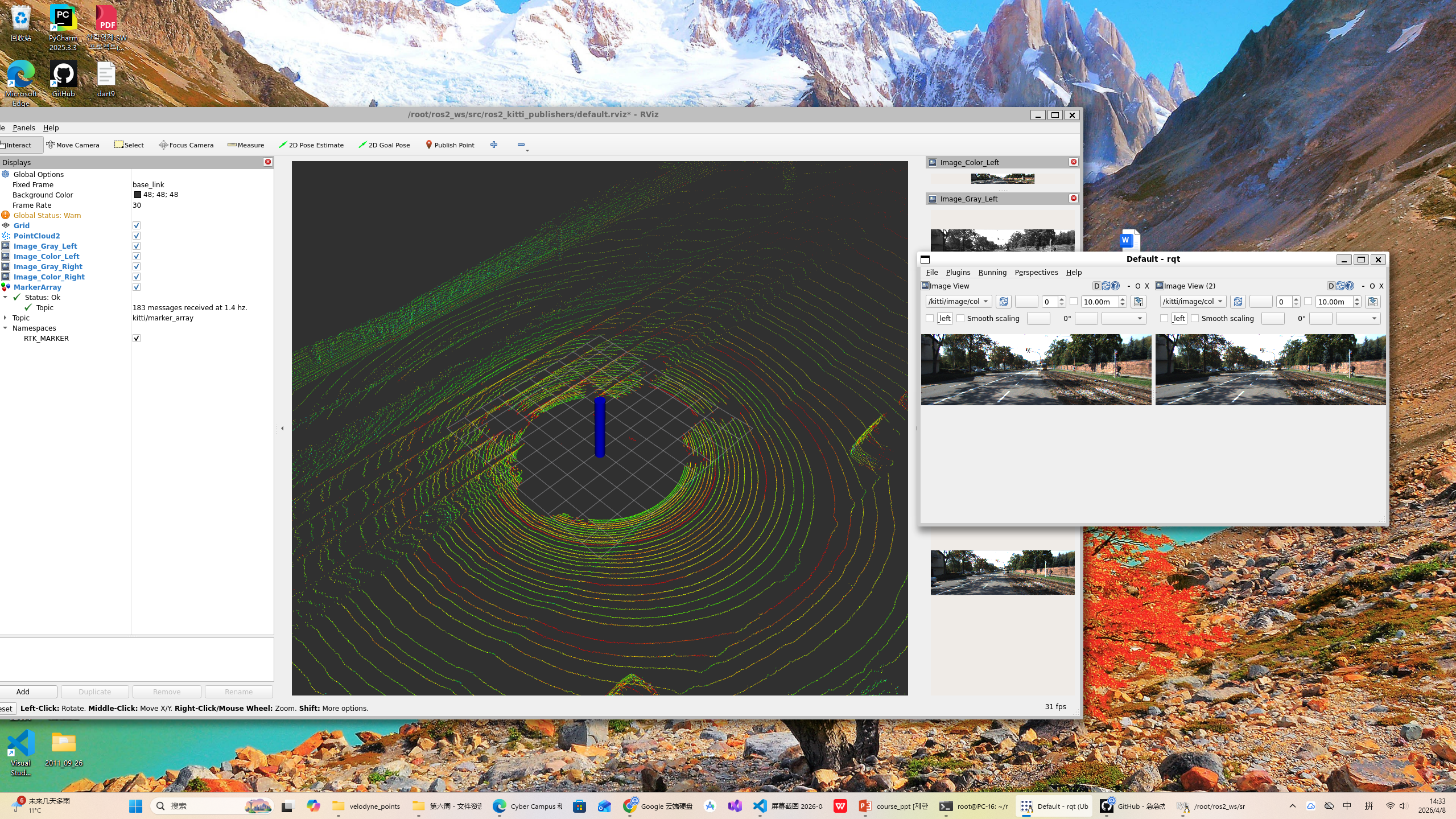
作业1:启动 rqt kitti数据集
今天我学会了启动 rqt kitti数据集 姓名:여세걸
PID 控制中 P、I、D 分别表示什么? P 表示比例控制,根据当前误差进行调整。 I 表示积分控制,根据过去误差累积进行修正。 D 表示微分控制,根据误差变化速度进行提前调整。
避障逻辑的基本思路 机器人通过传感器检测前方距离。 如果前方没有障碍物,就继续前进;如果距离太近,就后退并转向,避免碰撞。
总结 通过本周实验,我理解了闭环控制和 PID 控制的基本思想,并使用 Python 模拟了机器人遇到障碍物后的避障动作流程。