我的机器人课程作业
AI Robotics 课程作业整理
week4作业记录:
第四周课程内容:
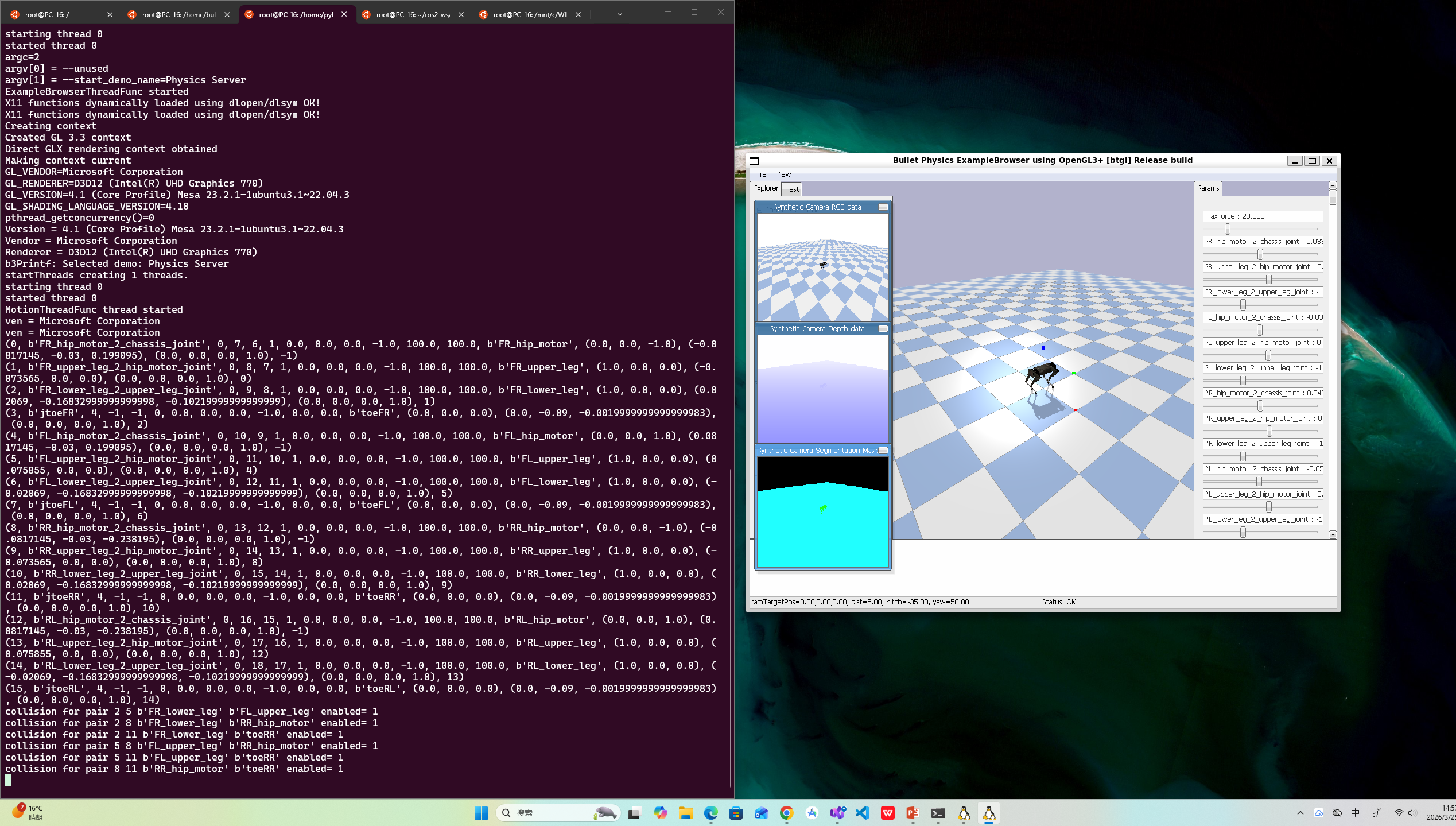
课程内容1:在程序里感受坐标系
作业成果:
作业1:在程序中将机器人翻到
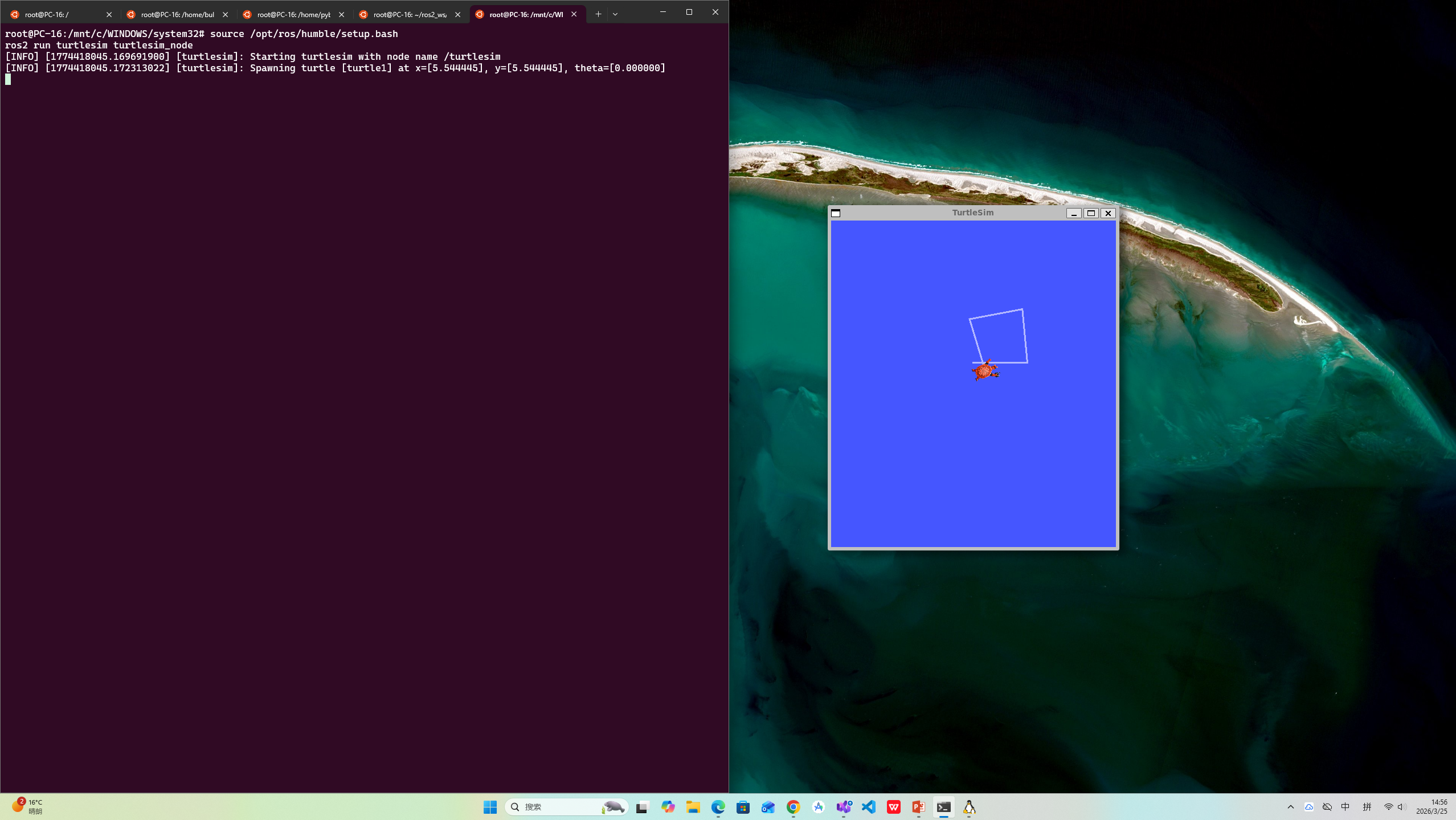
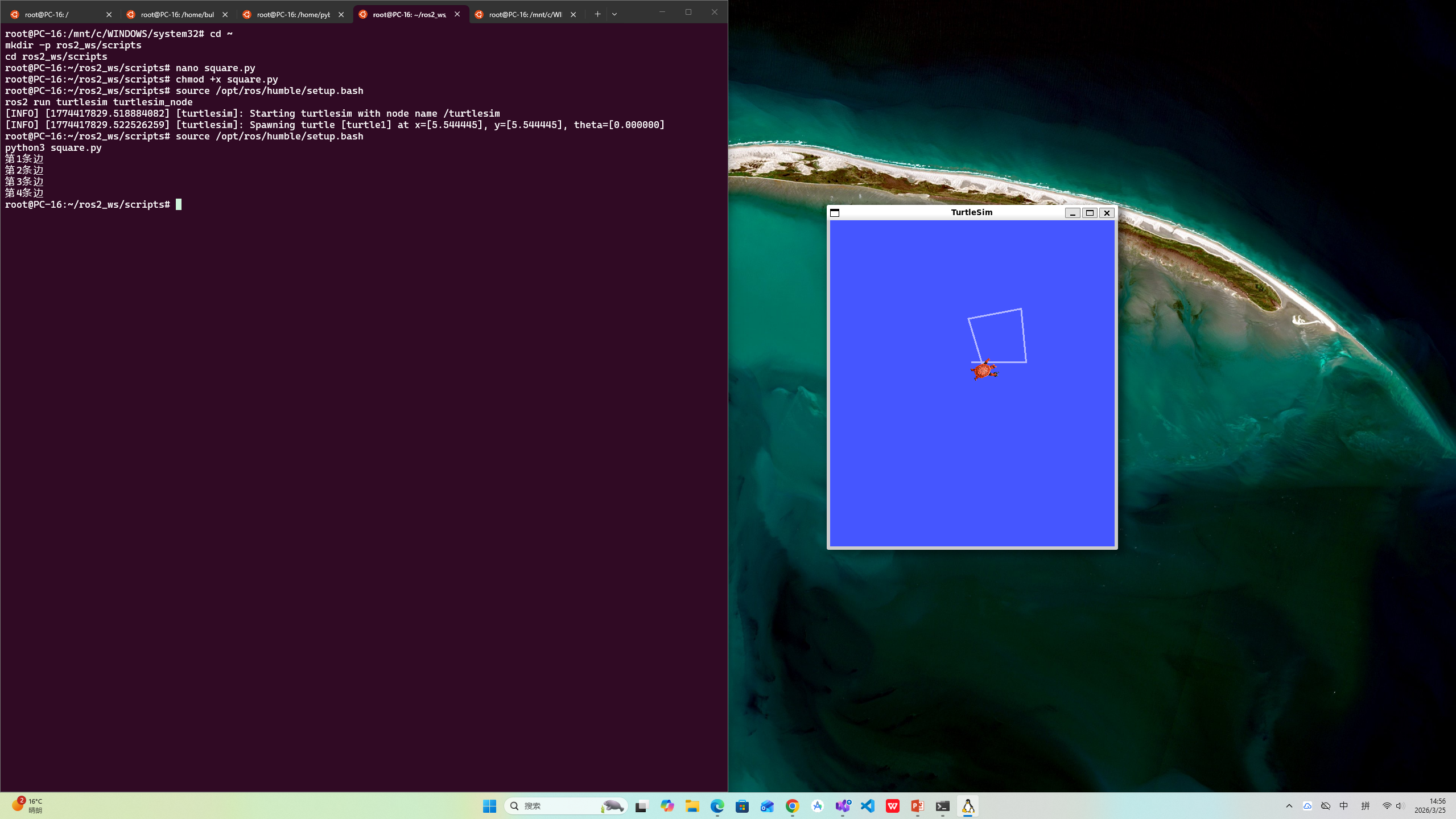
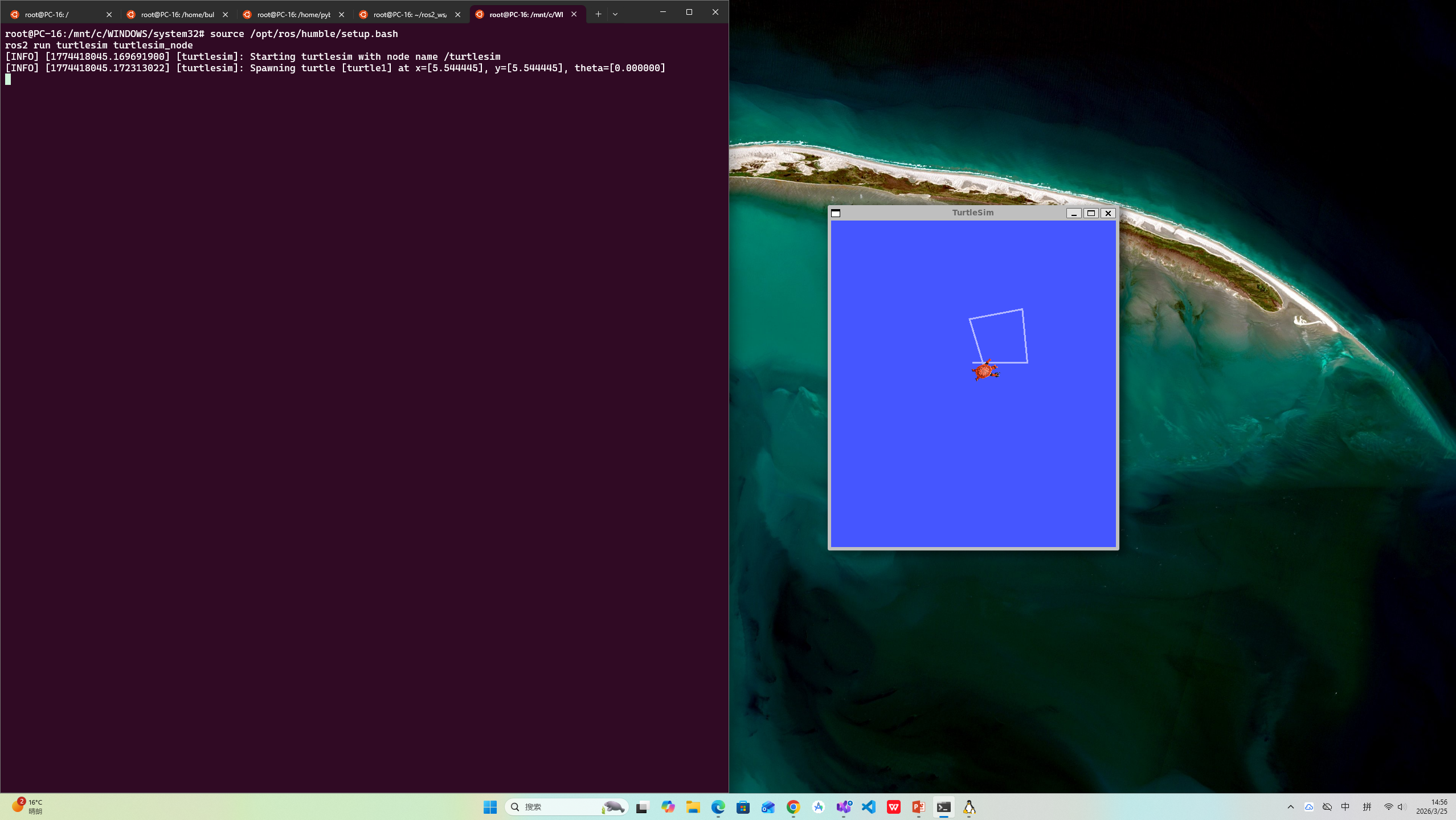
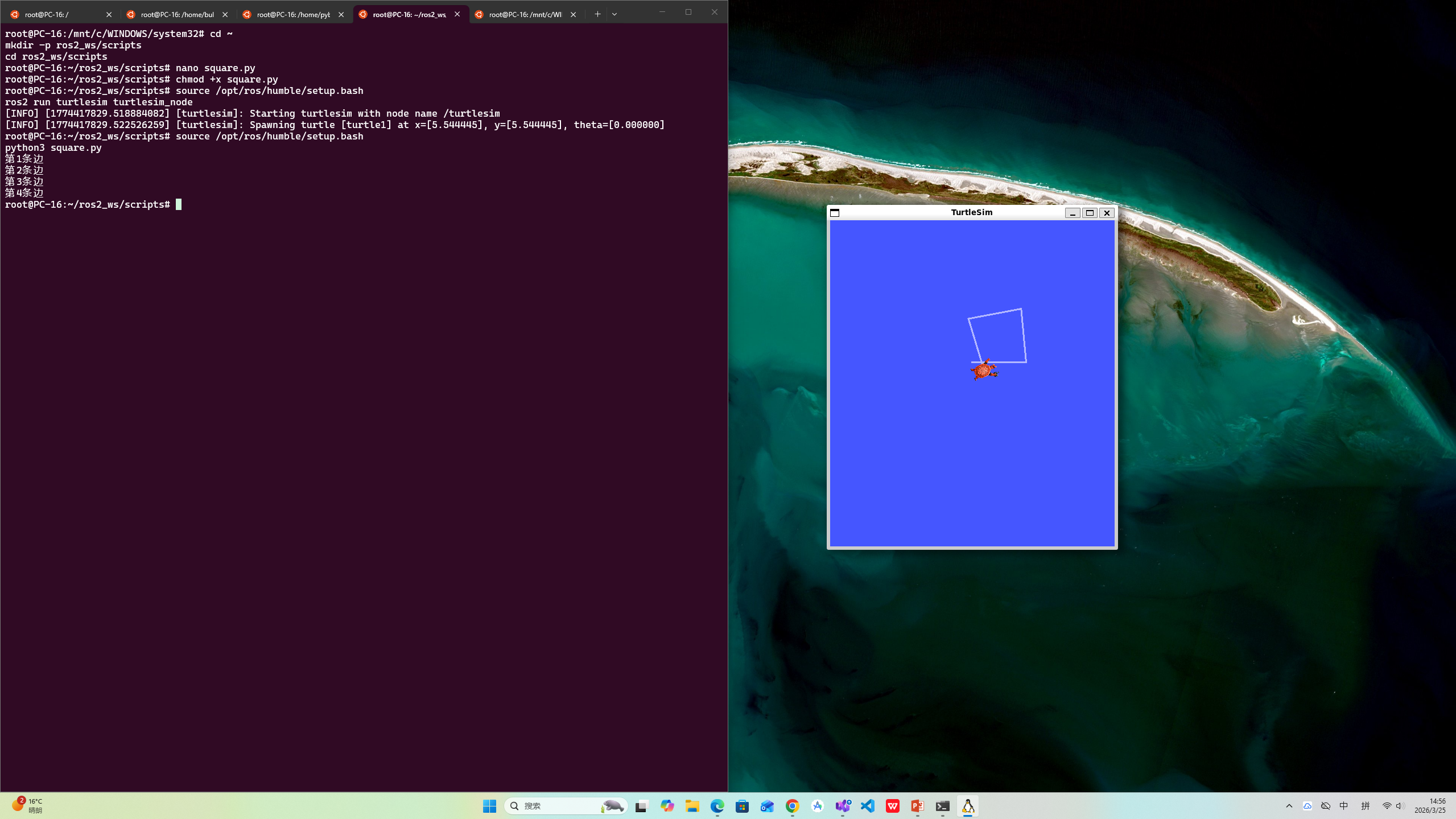
解决方法 通过调整 linear.x 与 angular.z 参数比例,使机器人保持稳定圆周运动。
本周总结 通过本周实验:
学习了 ROS2 基础控制方式 理解了机器人运动学原理 掌握了 turtlesim 控制方法 学会了通过速度参数实现圆周运动 为后续机器人导航与运动控制实验打下基础。
AI Robotics 课程作业整理
解决方法 通过调整 linear.x 与 angular.z 参数比例,使机器人保持稳定圆周运动。
本周总结 通过本周实验:
学习了 ROS2 基础控制方式 理解了机器人运动学原理 掌握了 turtlesim 控制方法 学会了通过速度参数实现圆周运动 为后续机器人导航与运动控制实验打下基础。