我的机器人课程作业
AI Robotics 课程作业整理
week3作业记录:
第三周课程内容:
课程内容1:编程基础概念说明
课程内容2:机器人基础概念说明
课程内容3:运行程序作业
作业成果:
作业1:ros2 小乌龟画直线加机器狗
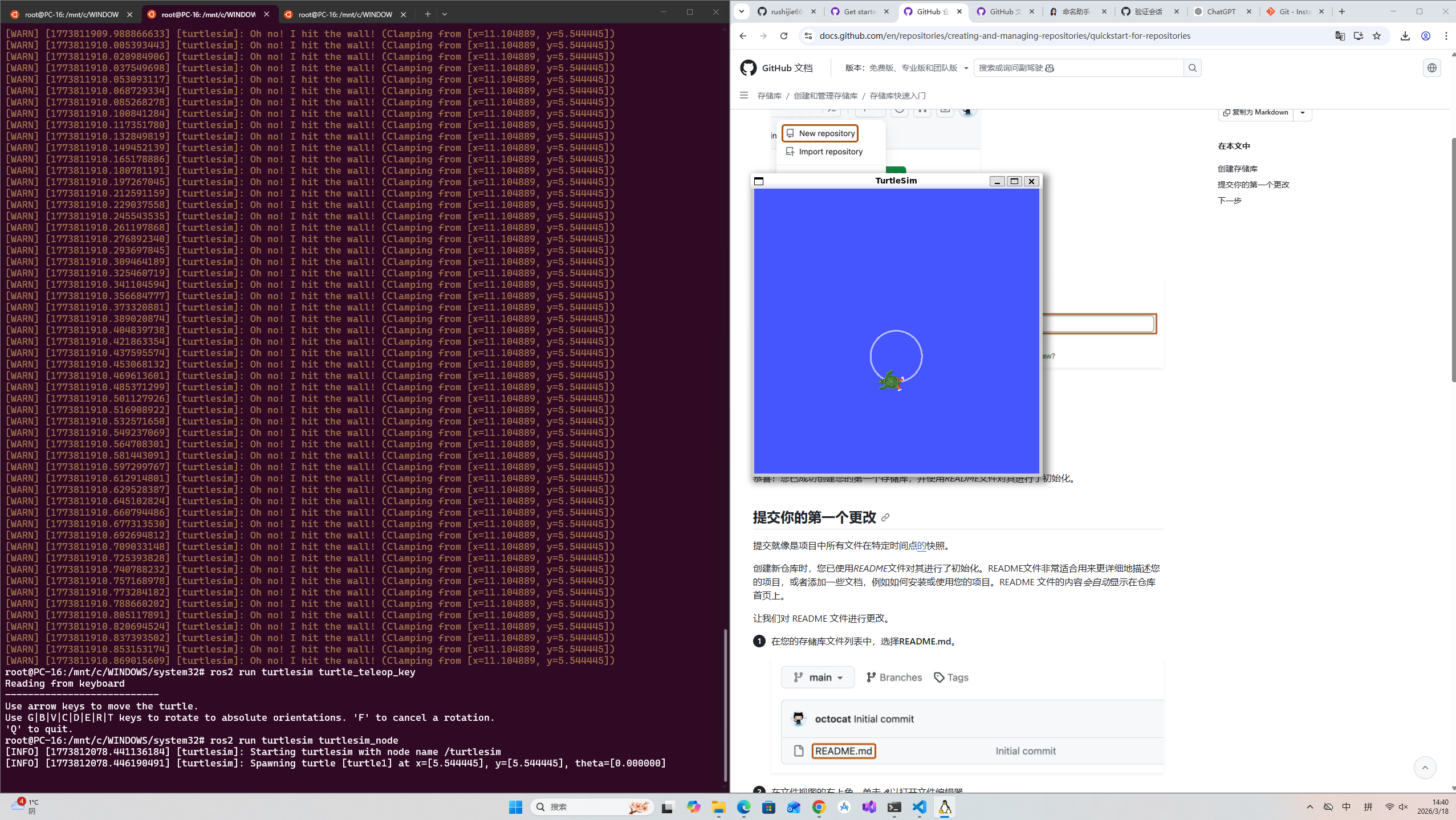
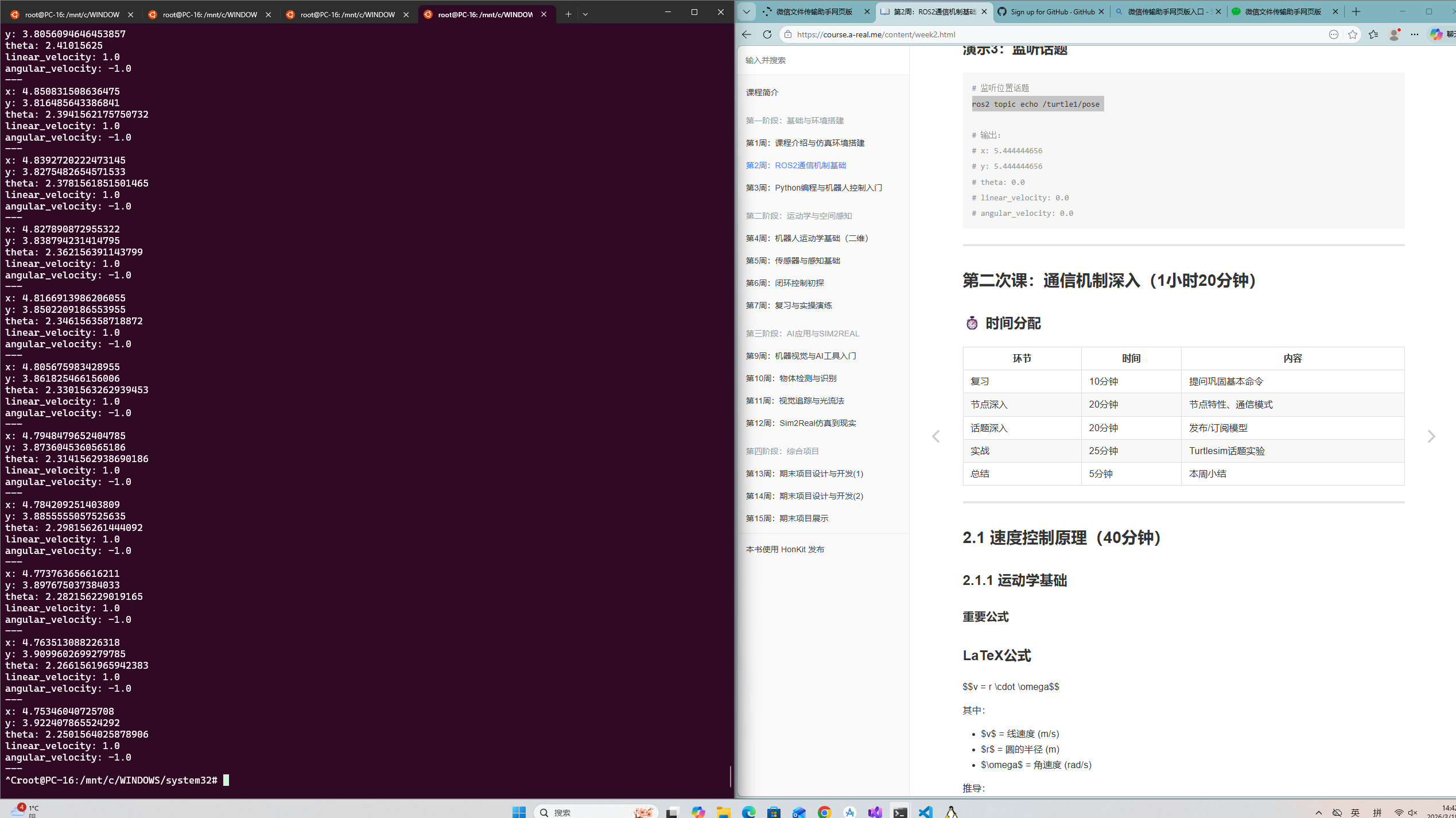
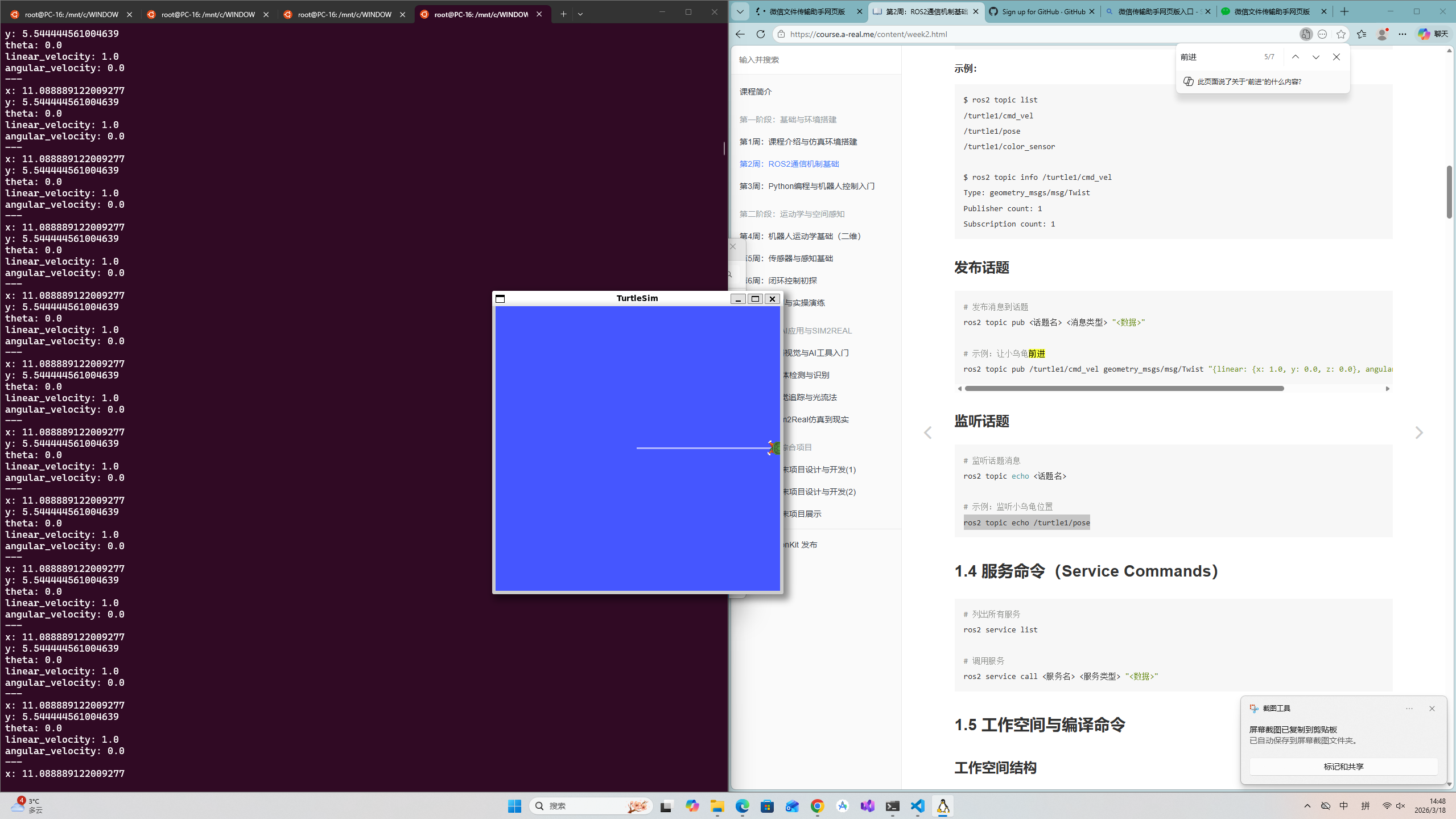
- 核心理解 机器人运动可以拆成线速度和角速度两个部分。 ROS2 中常用 Twist 消息表达速度控制命令。 圆形轨迹不是直接“画圆”,而是通过连续发布速度指令让机器人自然运动出来。
- 问题与解决 如果圆太大或太小,可以调整 linear.x / angular.z 的比例。 如果轨迹不连续,需要持续发布速度消息,而不是只发布一次。
- 本周总结 把 Python 基础和机器人运动联系起来,理解了速度控制与轨迹生成之间的关系,并完成了 TurtleSim 画圆实验。