我的机器人课程作业
AI Robotics 课程作业整理
week2作业记录:
第二周课程内容:
课程内容1:设置github ssh密钥并进行ubuntu里的命令行交互
课程内容2:设置vs code 与wsl ubuntu交互
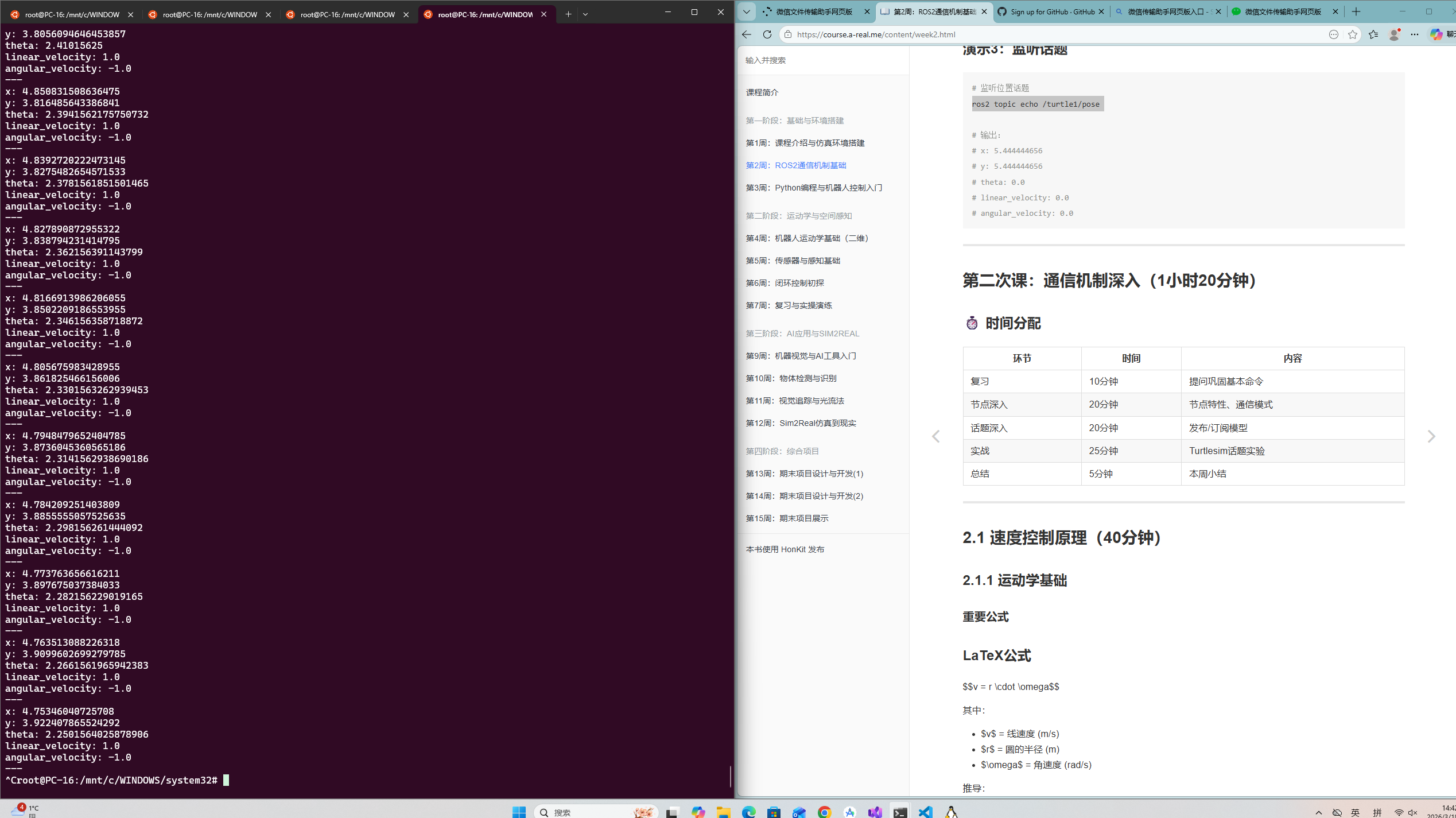
课程内容3:运行小乌龟节点,进行ros命令行交互
作业成果:
作业1:运行ros2 画直线
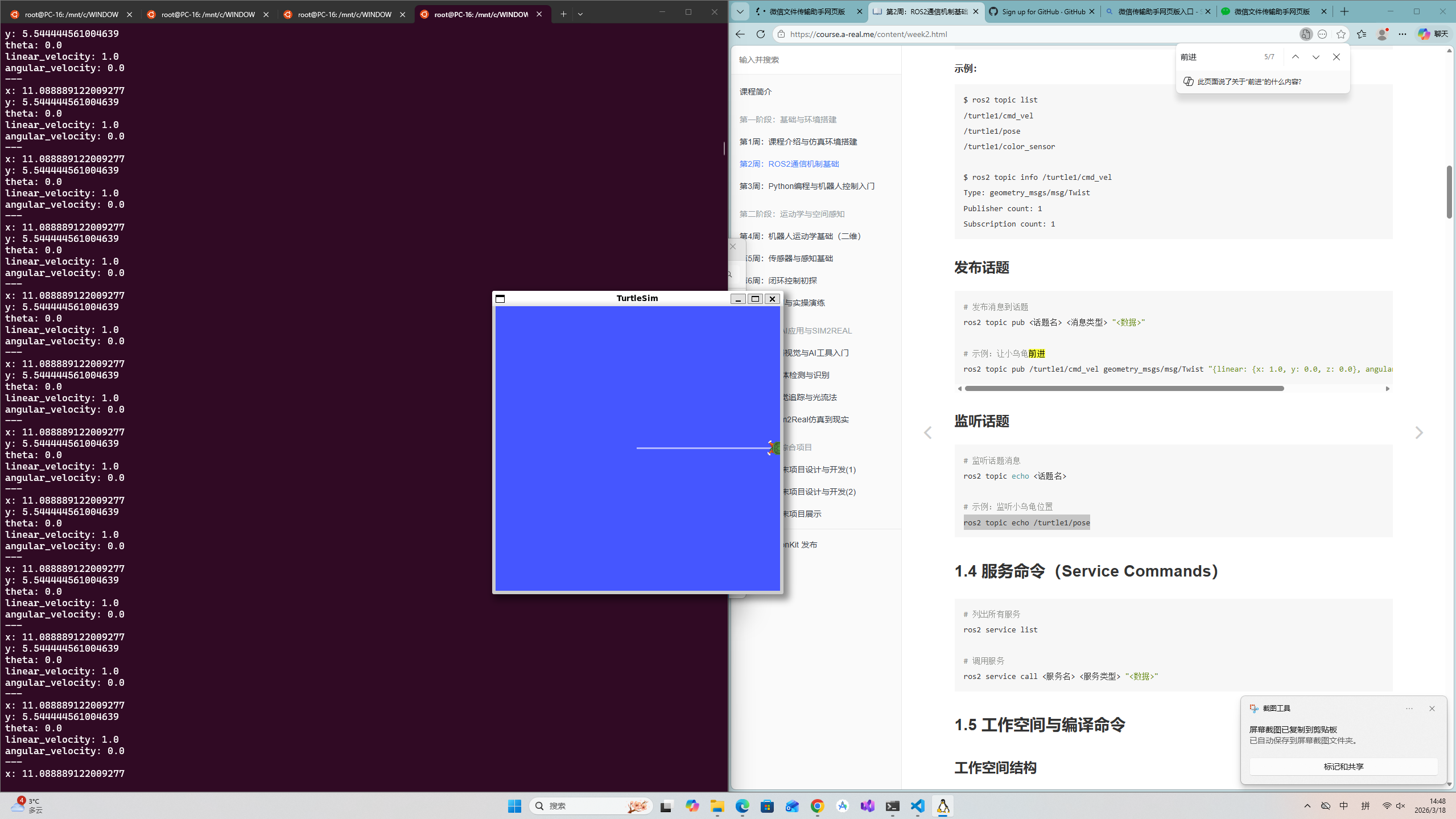
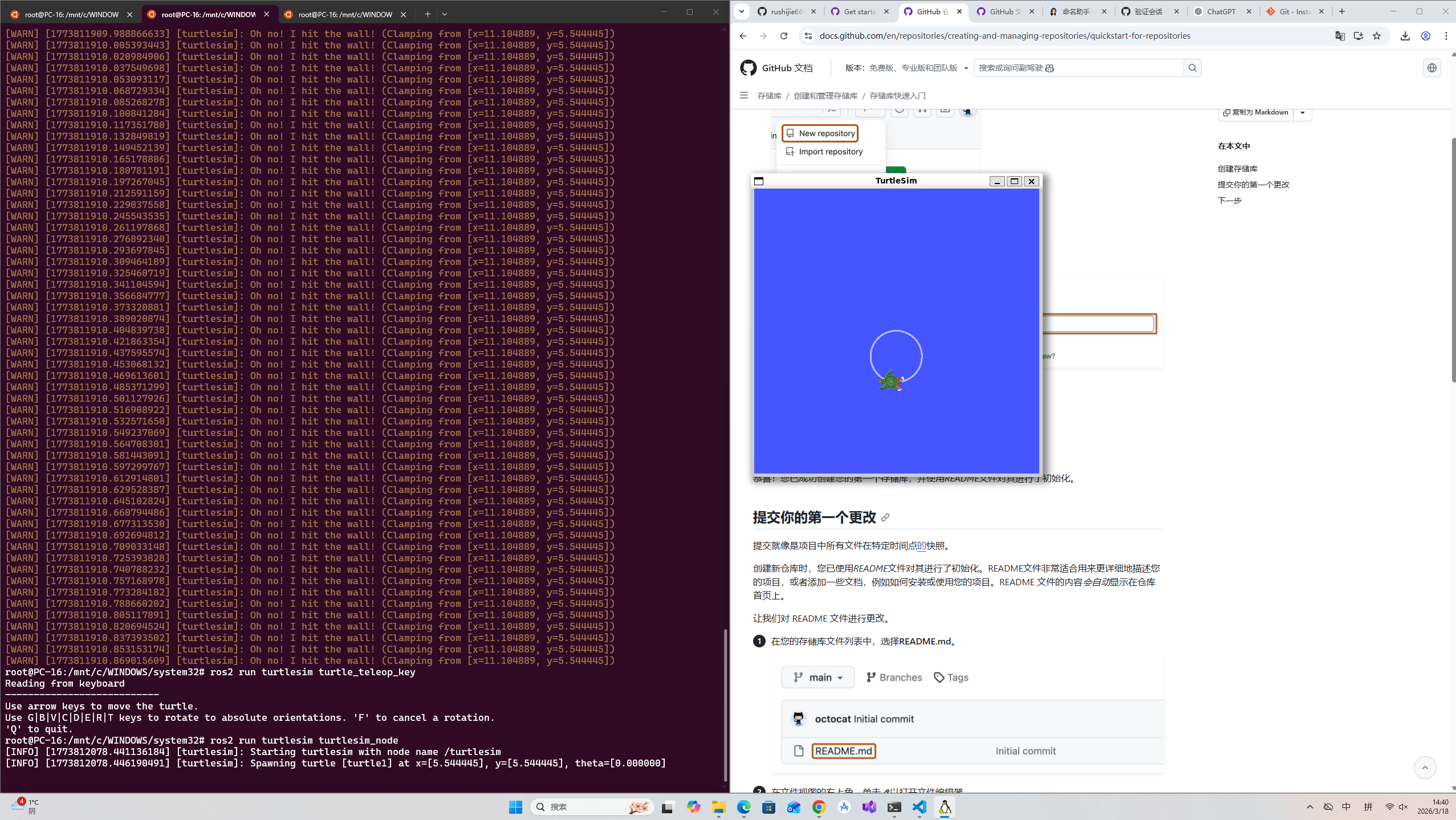
- 核心理解 ROS2 的节点之间通过 Topic 通信,控制小乌龟时本质上是在向 /turtle1/cmd_vel 发布速度消息。 VS Code + WSL 的组合适合机器人课程实验:代码管理清楚,命令运行环境也接近真实 Linux。 GitHub SSH 配置成功后,课程作业可以稳定同步到远程仓库。
- 问题与解决 如果 ssh -T git@github.com 失败,需要检查公钥是否复制完整。 如果 TurtleSim 没有反应,需要确认控制命令发布到正确话题 /turtle1/cmd_vel。
- 本周总结 本周完成了 GitHub、VS Code、WSL 与 ROS2 的基础联动,并通过 TurtleSim 直线运动验证了 ROS2 控制链路。