我的机器人课程作业
AI Robotics 课程作业整理
week1作业记录:
作业成果:
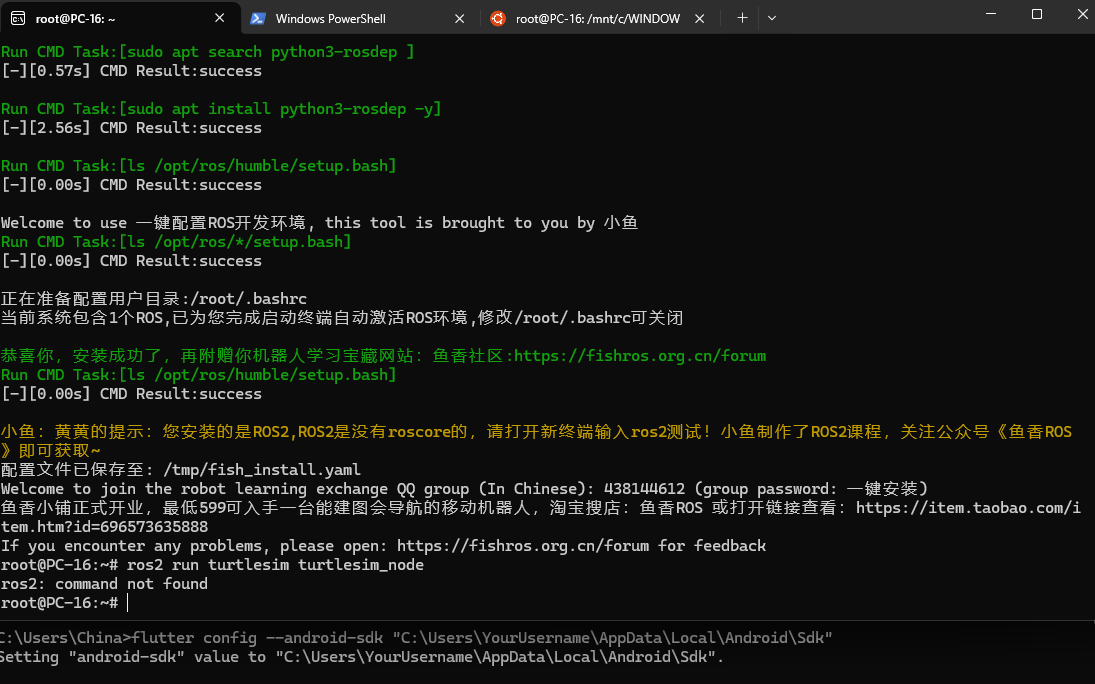
作业1:成功安装启动ros2
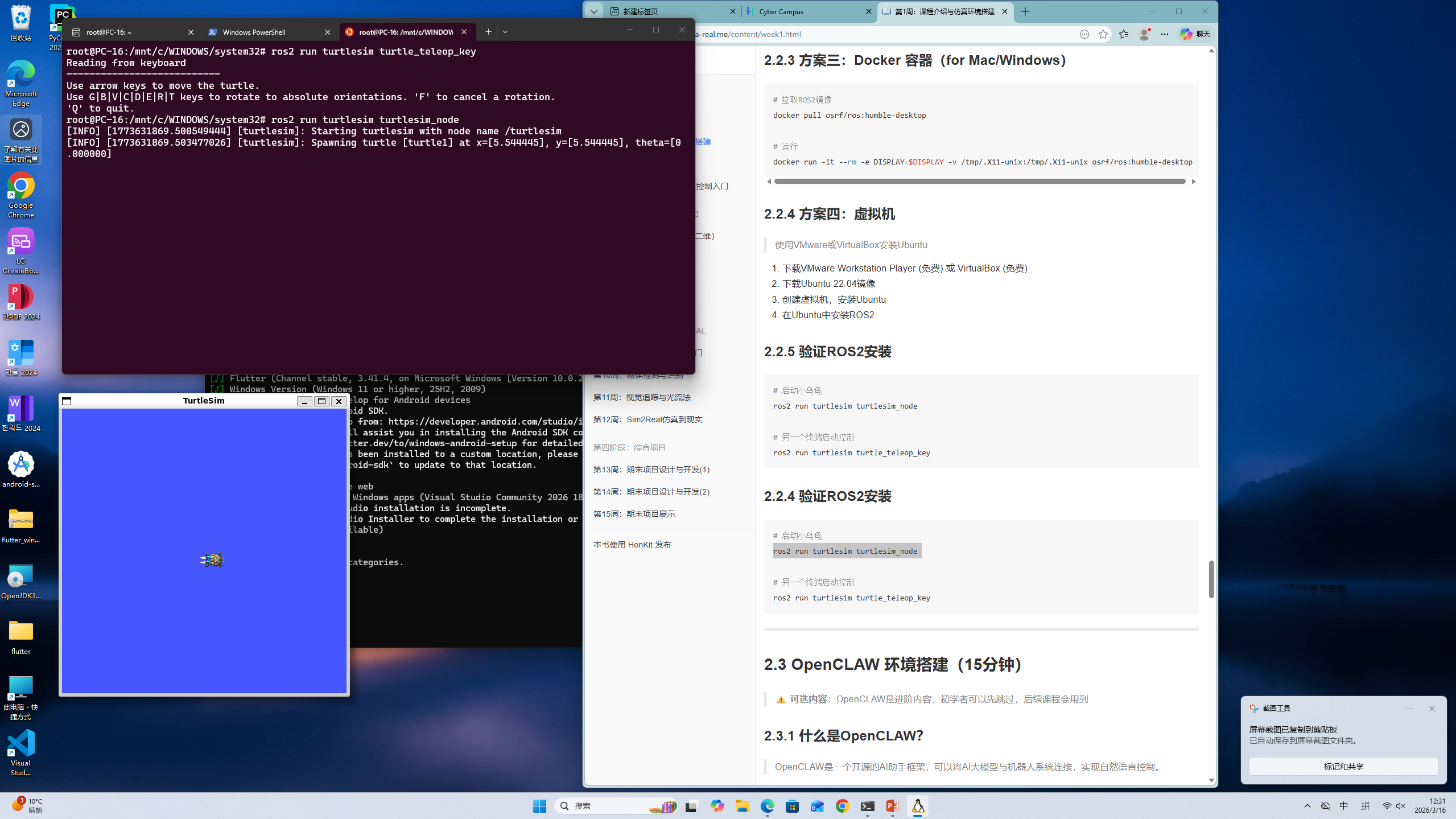
核心理解 ROS2 是机器人软件系统的通信框架,后续会用节点、话题和消息来控制机器人。 Python 是本课程主要的控制脚本语言,适合快速编写实验程序。 环境搭建是后续实验的基础,如果 Python、Ubuntu 或 ROS2 版本不一致,后面运行节点时容易出错。
问题与解决 图形程序启动前需要确认 Ubuntu/WSL 或 Docker 图形环境可用。 运行 ROS2 命令前需要先确认终端环境已经加载 ROS2 配置。
总结 本周完成了机器人课程的基础环境准备,并通过 OpenCLAW、Python 版本检查和 TurtleSim 启动截图证明环境可用。下一步可以开始学习 ROS2 节点通信与机器人运动控制。